Presentation at conference
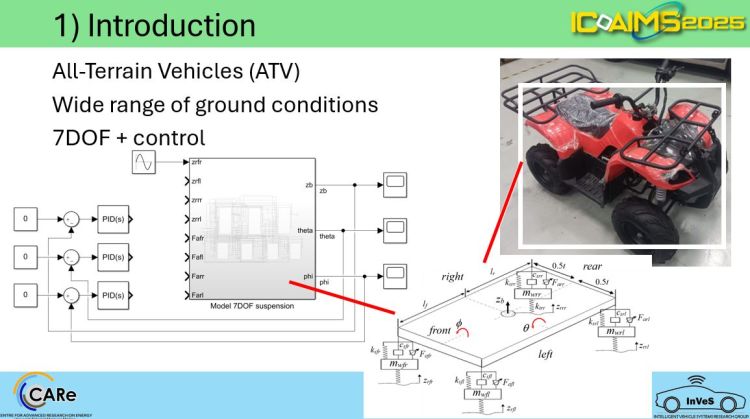
Improvement of Vehicle Dynamic Model and Control using Decoupling Transformation for All-Terrain Vehicles (ATVs)

Intelligent Vehicle System (InVES)
Improvement of Vehicle Dynamic Model and Control using Decoupling Transformation for All-Terrain Vehicles (ATVs)